最近、色々な種類のPICデバイスが発売されています。又、安い価格で販売されています。
この様な新しいPIC デバイスを使おうとすると、どの様にしたら良いか迷ってしまいます。
Web上で検索して、情報を集めて使い方を調べる方法が有りますが、万全ではありません。
そこで、データ・シートを頼りに使い方を調べる事にしました。
使うデバイスは、'PIC 16F1823' です。
このデバイスは、14PINの中規模デバイスです。
まず、最初にする事は、'CONFIG’ワードの設定です。このCONFIGワードは、
データ・シートには記載されていません。
では、どの様にして調べると良いのでしょうか?
それは、'HI-TECH C’プログラムの中の 'include’フォルダーの中のファイルを調べる事です。
デバイス毎の'h'ファイルが有るのでメモ帳などで開いて見ます。
PIC 16F1823は、'pic16f1823.h'です。
それぞれ、#define 命令等で定義されているのが分かります。
CONFIGワードは、以前の設定方法とは、異なり、'***_ON'、'***_OFF'と、云う記述になっています。
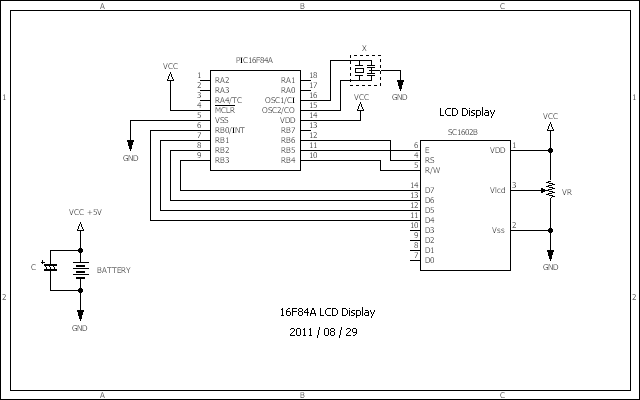
* 回路図


次に、オシレータの設定をします。これには、データ・シートの'OSCCON' レジスターの設定を見ます。

次に、I/Oの設定をします。
■ TRISA,TRISC の入出力設定をします。
I/O ポートの設定をします。
■ アナログ・チャンネルの設定をします。'ANSELA'、'ANSELC'レジスターを参照します。
設定を'1'にすると、アナログ・チャンネル'ON'
設定を'0'にすると、デジタルに設定されます。


次に、'A/D CONTROL REGISTER 0' を設定します。'ADCON0' レジスターを参照します。

このレジスターの 'bit1' の名称が 'GODONE' になっていますが、仕様が変更されているので使えません。
'GODONE' は、A/D変換開始(A/D変換終了フラグ)ビットなのですが、どの様に変更されたかを見てみます。
それには、'pic16f1823.h'の中の'ADCON0 'の設定項目を見ます。
■'GO_nDONE'
■'GO'
■'nDONE'
■'ADGO'
この4つのキー・ワードが使えます。

次に、'A/D CONTROL REGISTER 1' を設定します。'ADCON1' レジスターを参照します。

これで、主な設定が済みました。後は、プログラムを組むだけです。
その他のデバイスも同様な方法で設定すれば、'OK'です。
データ・シートさえ有れば、基本設定が出来る様になります。
[ 楽釣工房・ホームへ戻る ] [ ホーム・ページ 楽釣119 へ移動 ]